Transportation / Autonomous Systems
Faculty Working in the Area







Research Highlights
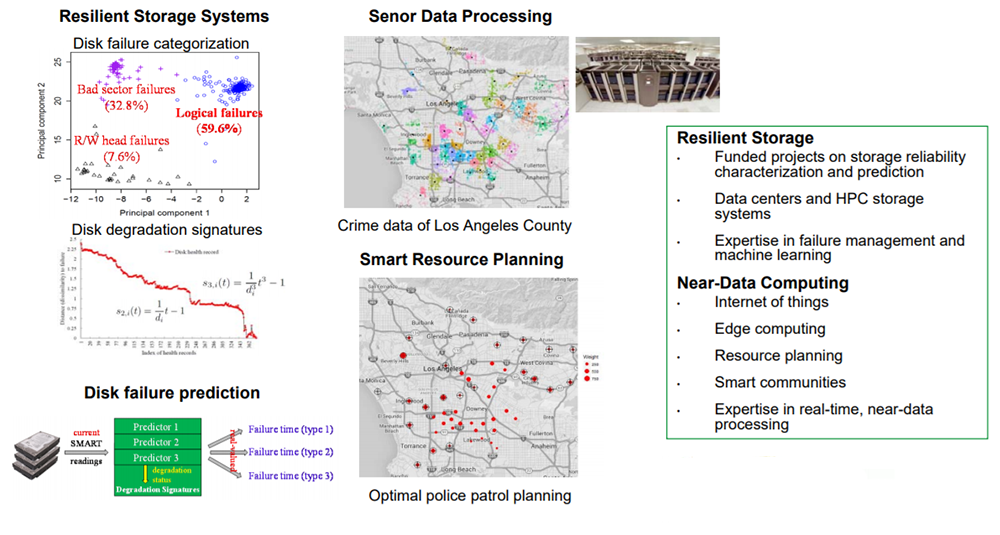
IoT/edge computing for sensor data processing and smart resource planning
Dr. Fu's research is dedicated to the investigation, establishment, and experimental evaluation of new theoretical foundations and system artifacts to significantly improve the system resilience, power & energy, and performance. His research interest is primarily in high-performance computing, distributed and cloud systems.
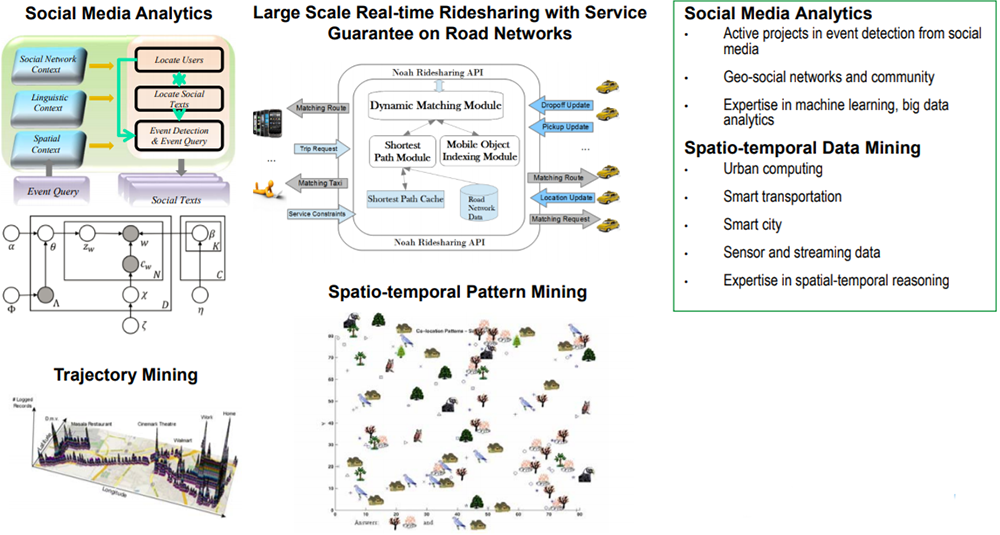
Large scale real time ride sharing network with service guarantee, social media analytics, spatio-temporal data mining
Her research interests include spatio-temporal databases and mining, geo-stream data processing, smart transportation, and location-based social networks. Her research is supported by Texas Advanced Research Program (ARP), Oak Ridge National Lab, NSF, Texas Department of Transportation, and DoD.
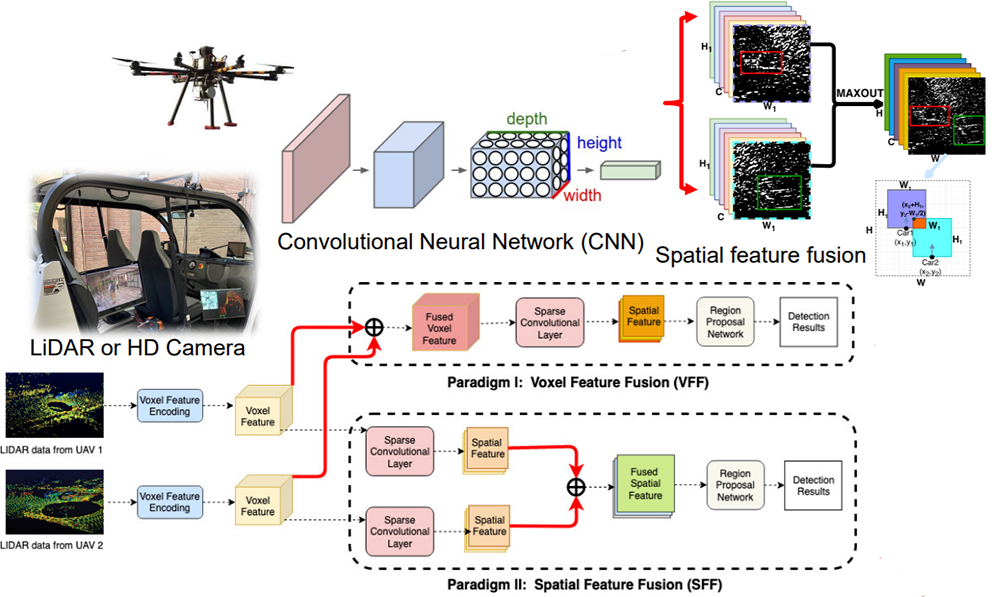
Deep learning on LIDAR data for drone computer vision
To the best our knowledge, we are the first to conduct a study on raw-data level cooperative perception for enhancing the detection ability of self-driving systems. In this work, relying on LiDAR 3D point clouds, we fuse the sensor data collected from different positions and angles of connected vehicles. A point cloud based 3D object detection method is proposed to work on a diversity of aligned point clouds. Experimental results on KITTI and our collected dataset show that the proposed system outperforms perception by extending sensing area, improving detection accuracy and promoting augmented results. Most importantly, we demonstrate it is possible to transmit point clouds data for cooperative perception via existing vehicular network technologies.
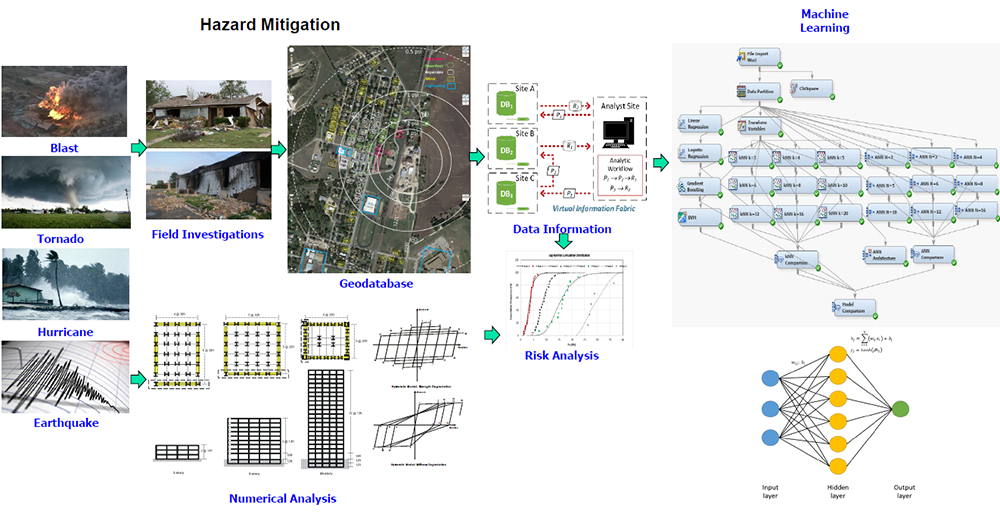
Machine learning and AI in civil engineering for hazard mitigation and transportation engineering