Autonomous Vehicles for Intelligent Mobility
Here at the UNT College of Engineering, our research in connected ground vehicles spans across a wide array of disciplines and applications. With 8 faculty members leading graduate and undergraduate students, our research intersects the disciplines of electrical, mechanical, engineering technology, materials science, and both computer science and computer engineering.
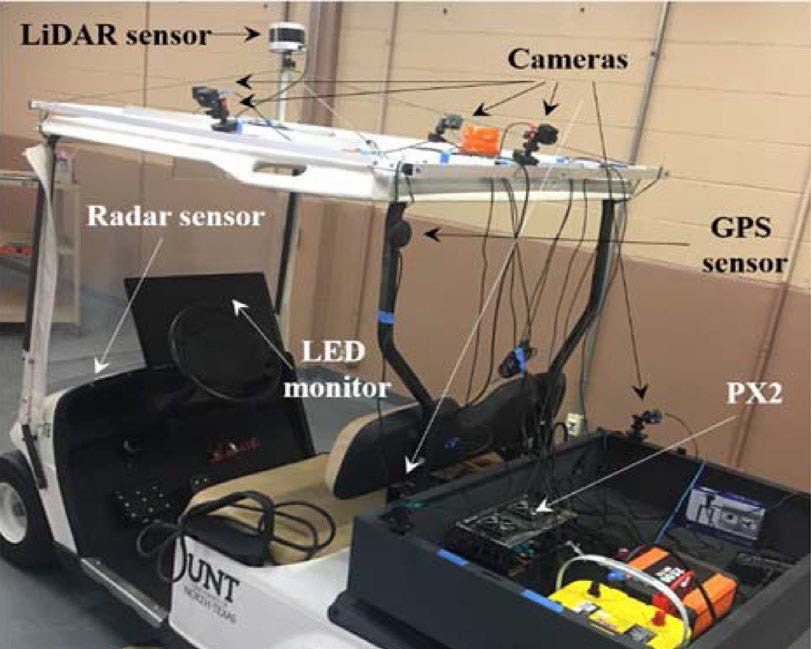
Connected Autonomous Vehicles (CAV)
- Accurate pedestrian and cyclist detection using 2D and 3D data fusion
- Finding blurry vehicles using Generative Adversarial Network
- Designing efficient deep learning models for autonomous vehicles
- Cooperative perception with data sharing between cars
- Edge computing for traffic monitoring
Edge Computing
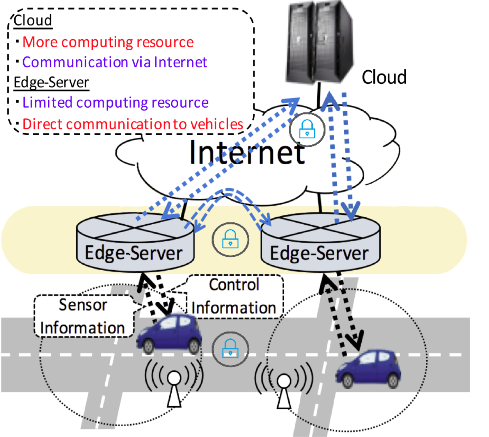
- Edge servers are much closer to cars
- Low latency for data movement, high responsiveness
- More computing capability than cars
- Local traffic management
Traffic monitoring & update, accident analysis, intersection safety
Finding Blurry Vehicles
Using enhanced super resolution Generative Adversarial Network (SRGAN)


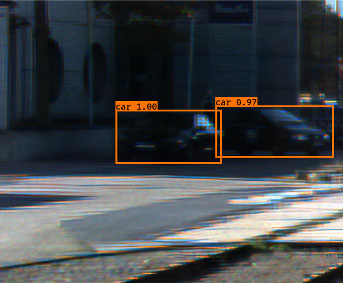
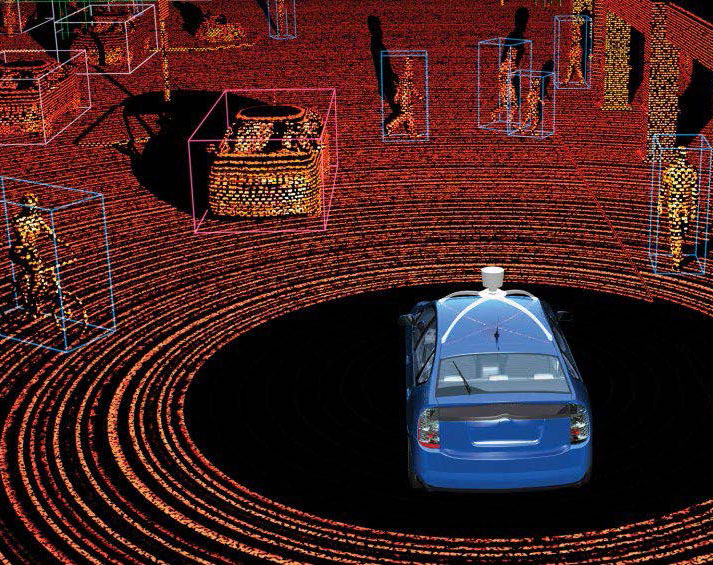
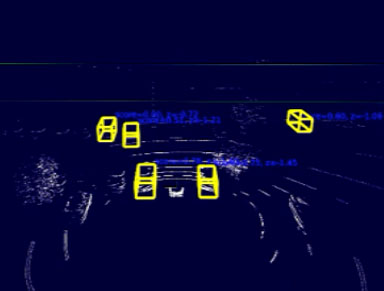
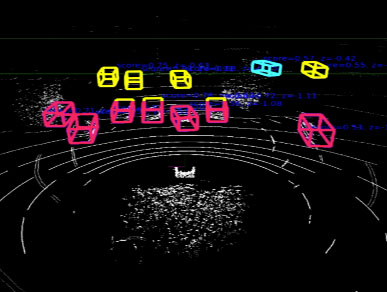
Cooperative Perception
LiDAR based data fusion for connected and autonomous vehiclesLiDAR based data fusion for connected and autonomous vehicles
Goals of data fusion
- Enhances the accuracy of object detection for autonomous vehicles
- Provides real-time information for traffic management and traffic control
- Provides anonymity of private information within the sensing range
- Increases system's reliability in case of sensor failures
Object detection on fused frames

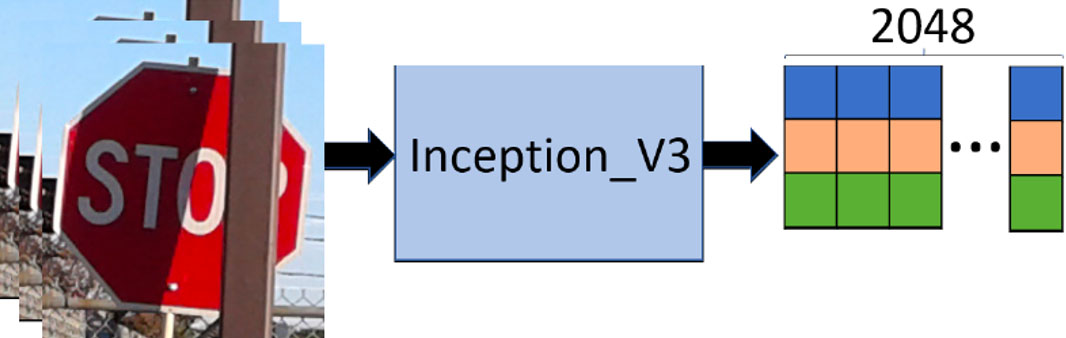
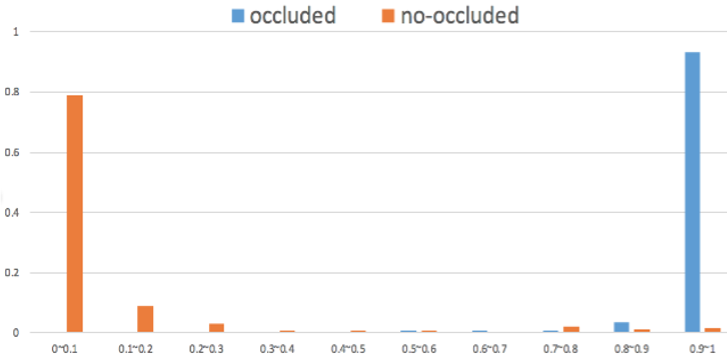
Occluded Road Sign Detection
LiDAR-Assisted Detection
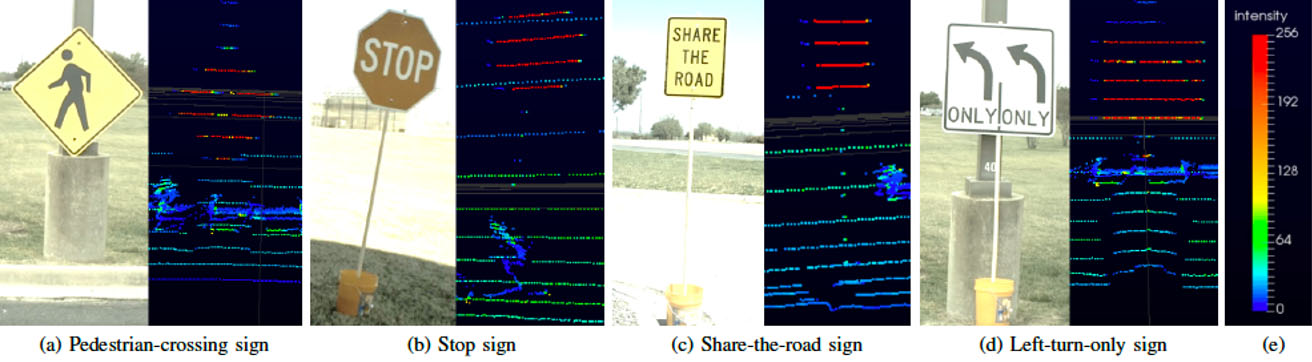
Transfer learning based solution
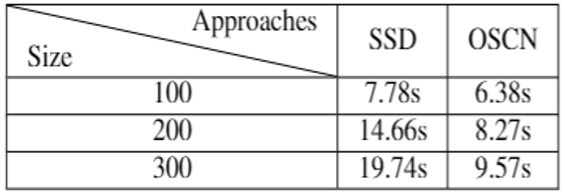
Experiment results

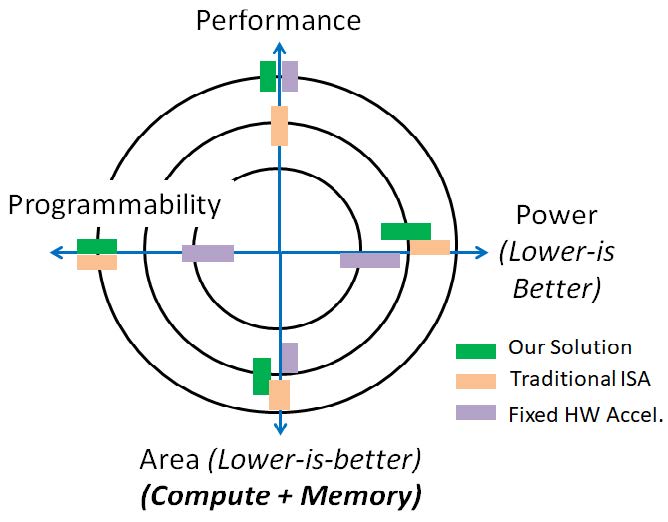
Low-Power Hardware for Real-Time Edge ML
A fully programmable architecture based on the open RISCV ISA, leveraging:
- Deep Quantization
- Feature sparsity
- Vectorized Execution
- Memory-side scatter-gather
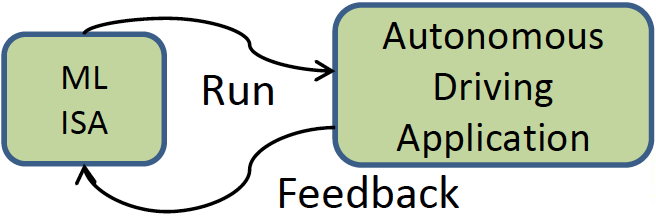
Feedback-driven Framework for ML ISA
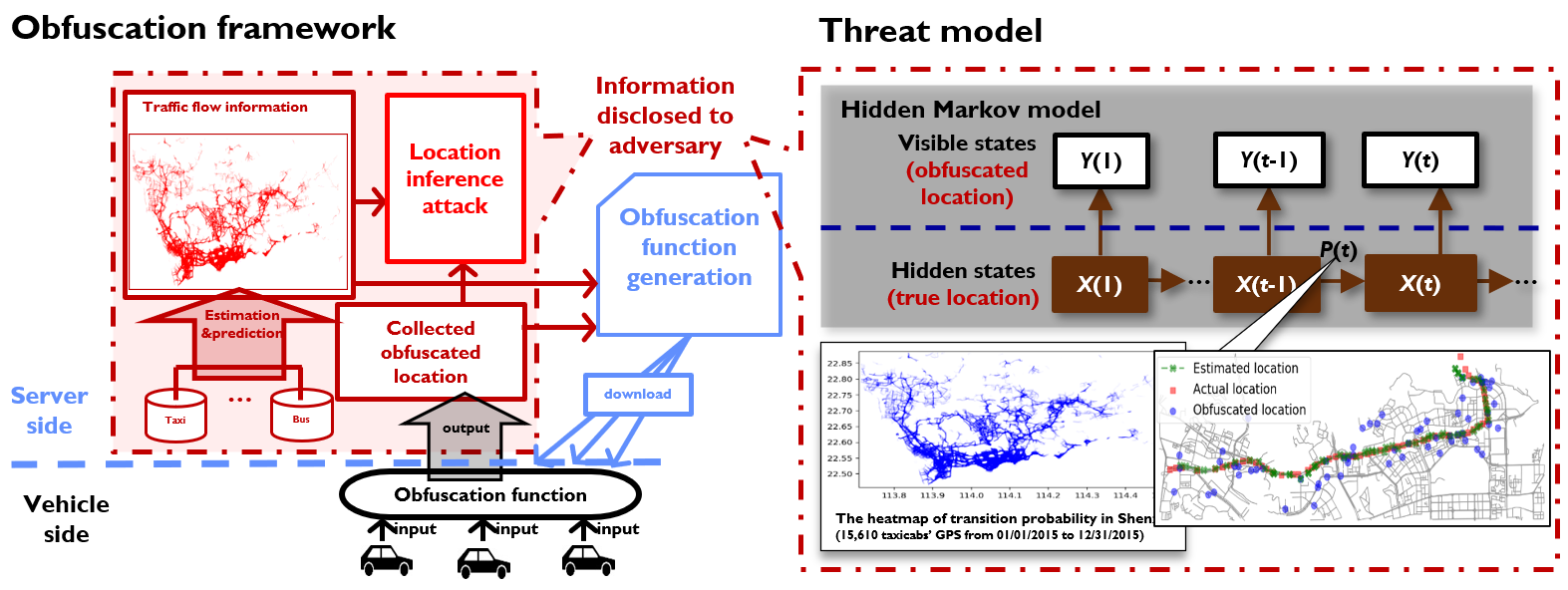
Vehicle Location Privacy Protection
- Vehicle traffic-aware location privacy threat models
- Location obfuscation mechanisms to protect against traffic-aware inference attacks
- Time-efficient obfuscation generation algorithms
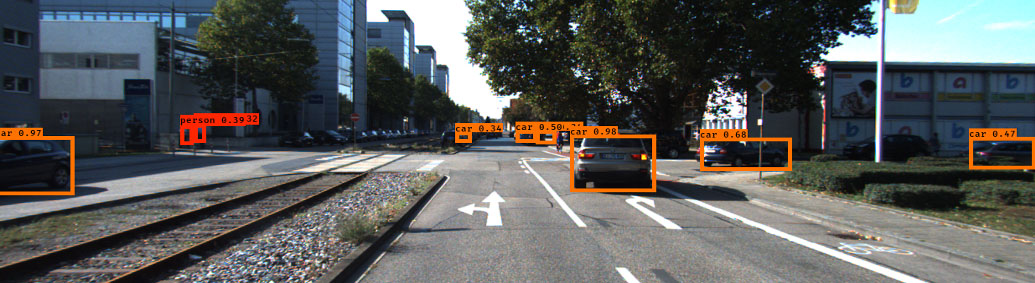
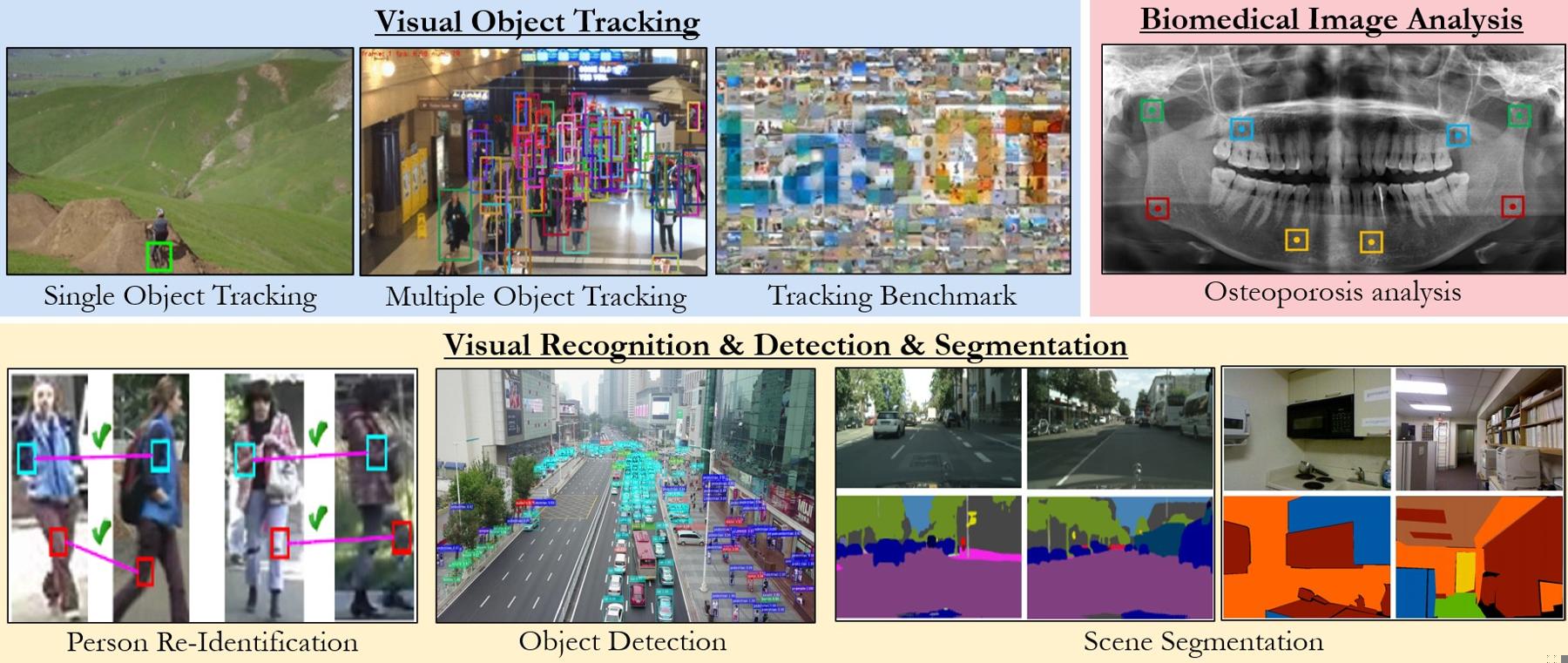
Person and Object Detection
Smart Microgrids for Autonomous Vehicle Power
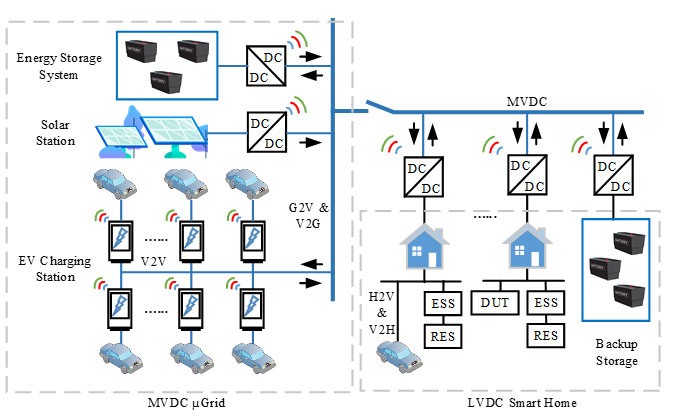
- Bottom-up power electronics microgrid solution
- Smart energy utilization technology
- Scalable, cost-effective and environmental-friendly design
- Hybrid circuit breaker solution for long life time protection
Mesh Network for Swarm Robotics
- The swarm robotics can achieve more challenging goals than what any single robot can achieve by working collaboratively.
- Individual robots may have simple design with limited computing, power, and functional capabilities.
- The swarm robotics network is distributed, decentralized, self-organizing, self-healing, and scalable.

BLE mesh network implementation with ESP32
for localization and tracking applications
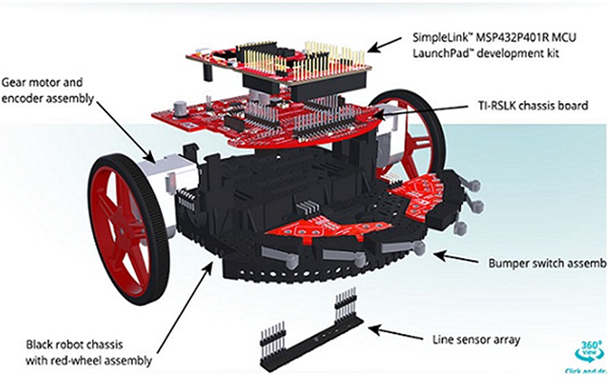
TI-RSLK MAX robotic cars as swarm robotics platform
Autonomous Ground Vehicles (AGV) Optimization and Precision Manufacturing
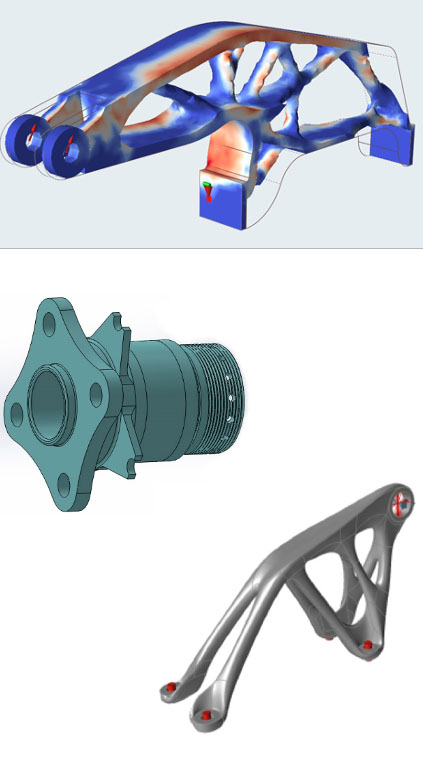
Design and Optimization of Automotive Structures

Rapid Prototyping and Proof of Concept Testing
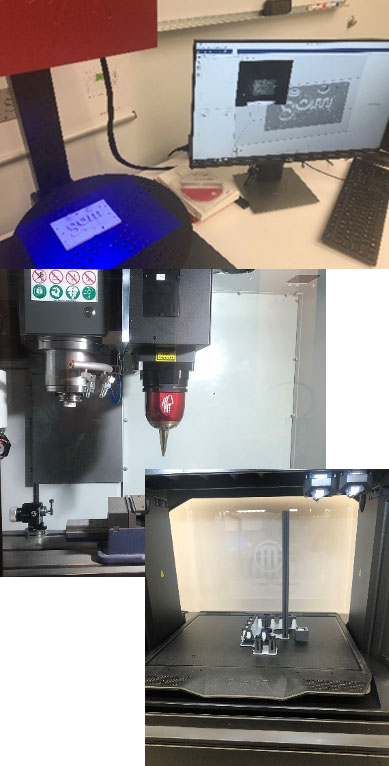
Additive Manufacturing Systems
Drone Nnetwork and Communications
Aerial Communication Infrastructure for Smart Emergency Response

- First drone-carried WiFi communication system
- Long-range (up to 5 miles) and broadband (54Mbps) drone-to-drone wireless link
- Received various awards and media coverage
- Community-centric project with collaborators: NCTCOG, Austin, Denton, Tarrant
Networked Airborne Computing Platform
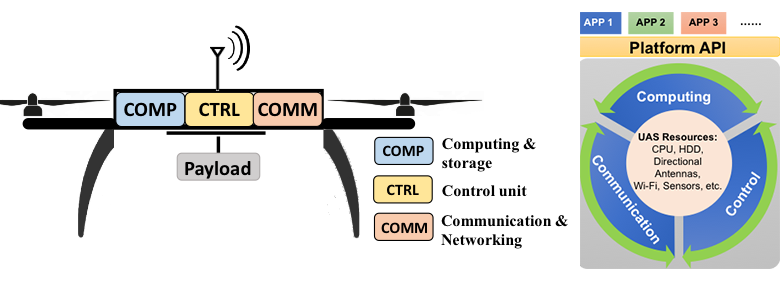
- Smart platform of modular design and full functionality
- Flexibility and extensibility for new development
- Friendly application development capability
3D Communication System
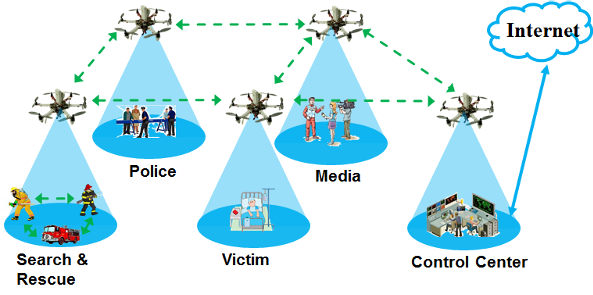
- Robust communication between drones for coordination
- Fast data collection and information fusion with drone networks and on-ground sensors
- Broadband networks including air-to-air and air-to-ground to enable real-time information exchange
- Seamless integration of drone networks with Internet of Things (IoT)
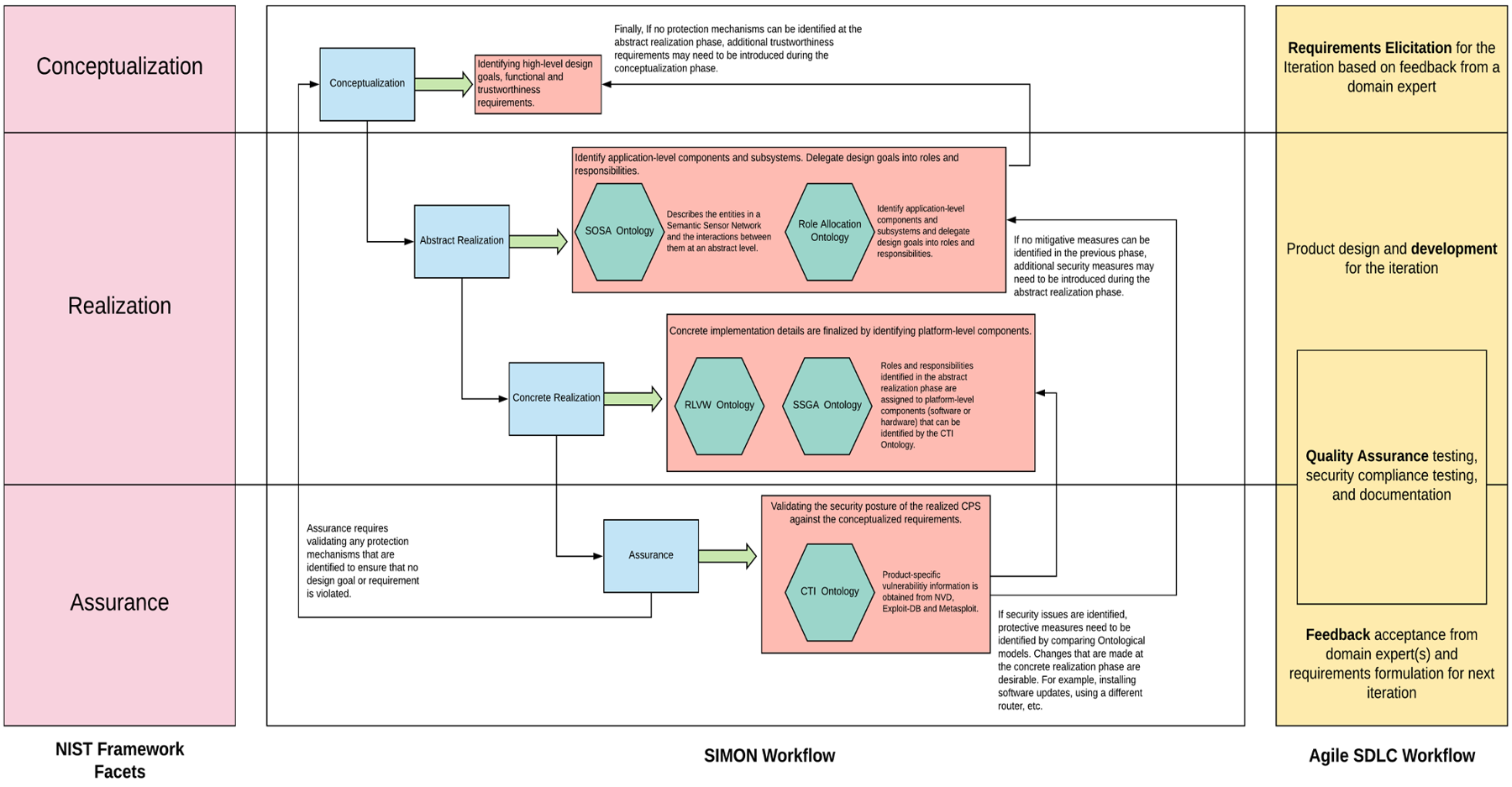
SIMON: Semantic Inference Model for Security in Cyber Physical Systems Using Ontologies
Simon utilizes ontologies and extended NIST CPS framework to identify and enumerate cyber threats that affect a CPS system of interest.
Lubricants and Coatings
Nanocarbon: Solid Lubricants
- Particular for the applied case
- Minimizes friction and wear
- Replaces toxic and carcinogenic materials
- Simplifies deposition procedures
- Reduces waste
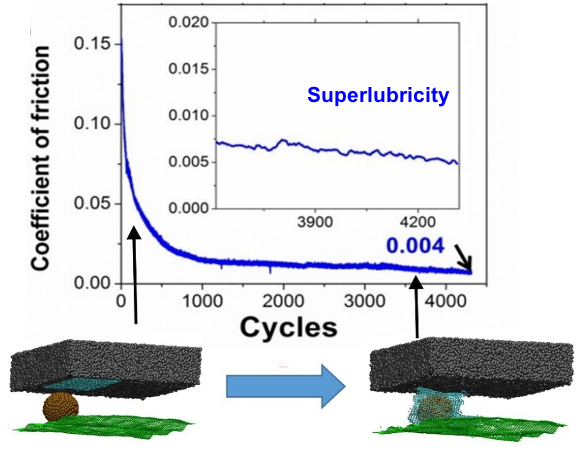
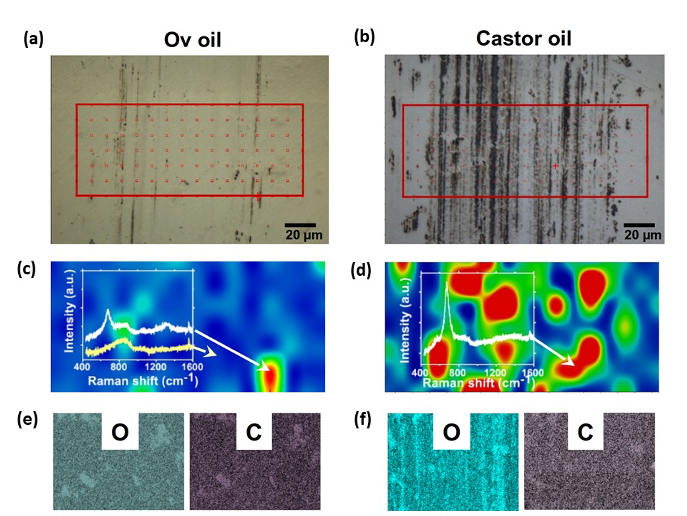
Biolubricants
- Naturally high viscosity
- High thermal stability
- High oxidation resistance
- Friction and wear reduction
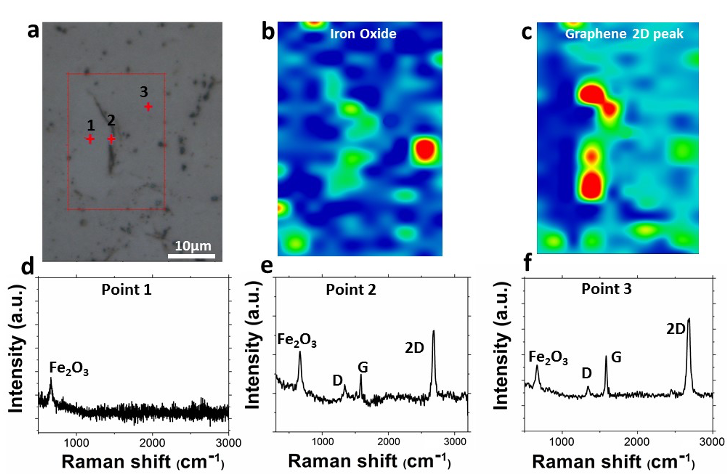
Nanocarbon: Anticorrosion Coatings
Monitoring pitting corrosion propagation dynamics through the defects in protective coatings
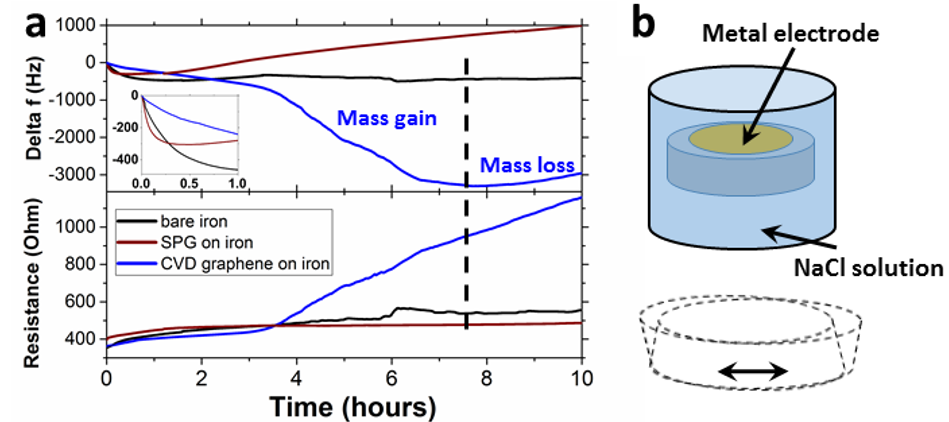
Quartz Crystal Microbalance is used for monitoring the dynamics
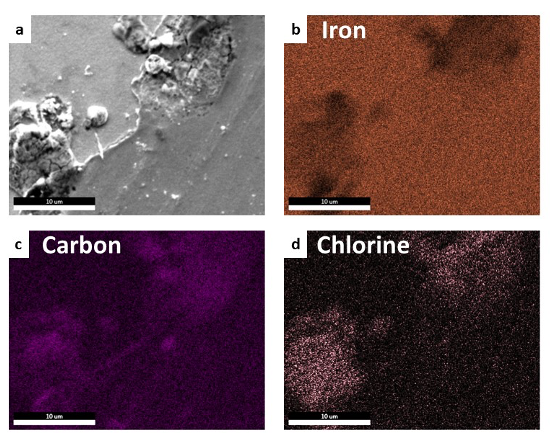
High degree of the corrosion in the defective sites is observed
Correlation between mass gain/loss as function of defects concentration is established
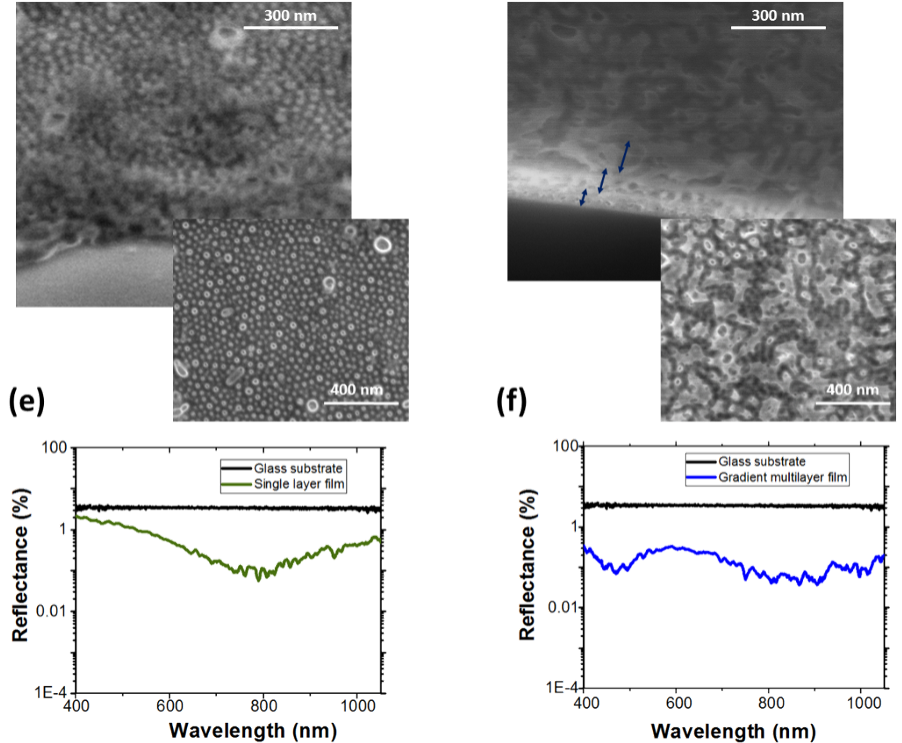
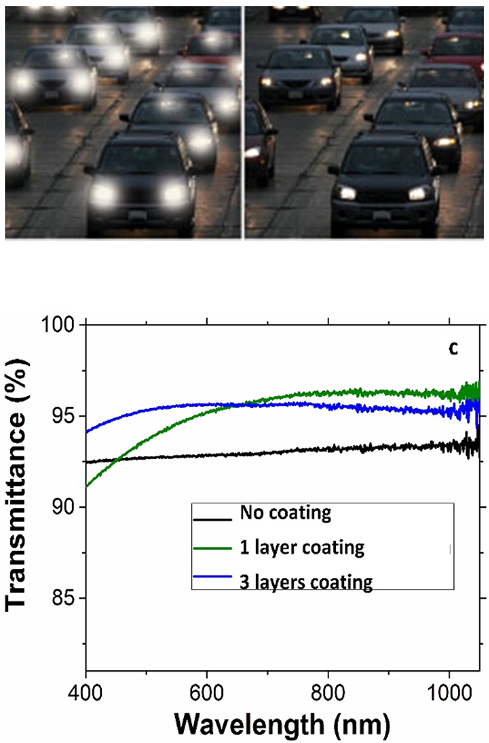
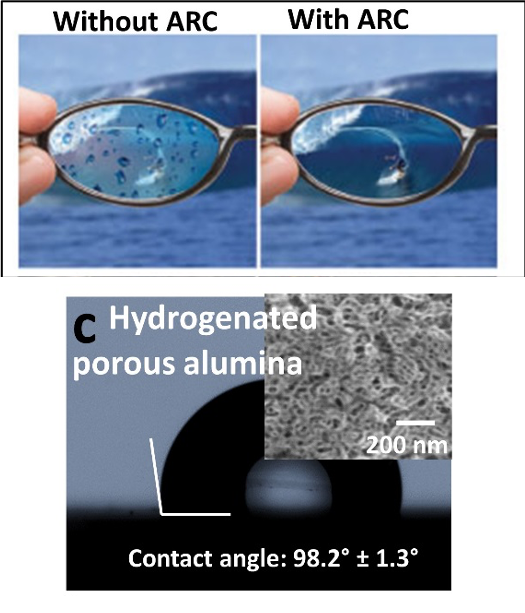
Nanoporous Ceramics: Antireflective Coatings
- Aluminum oxide, zinc oxide, titanium oxide
- High temperature stability, non-reactivity with UV light, alpha and gamma radiation
Nanoporous Ceramics: Antifogging Coatings
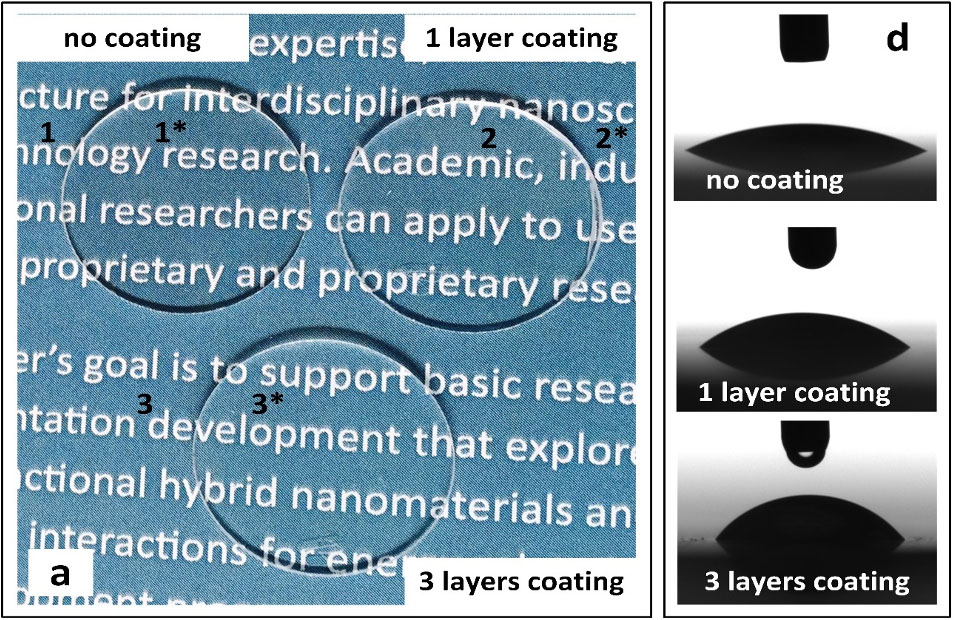
Contact angle of water droplet at the surface of plain glass and glass with single layer and graded index ARCs
Nanoporous Ceramics Composites: Antiwear Coatings
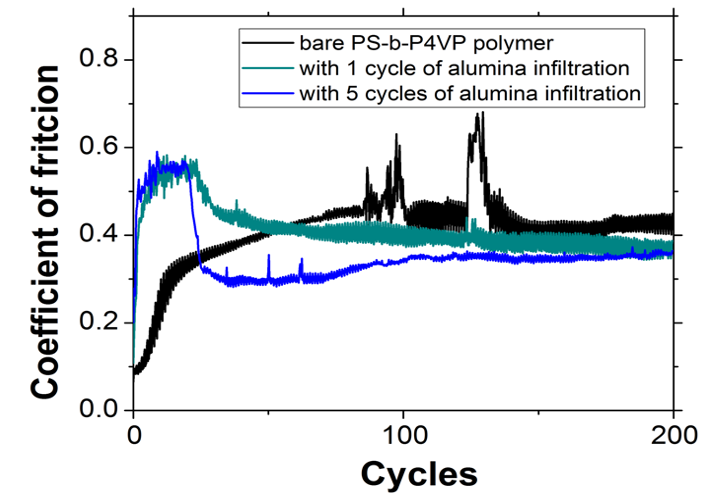
Coefficient of friction is decreasing with alumina layers
Reinforcement of polymer composites